
История
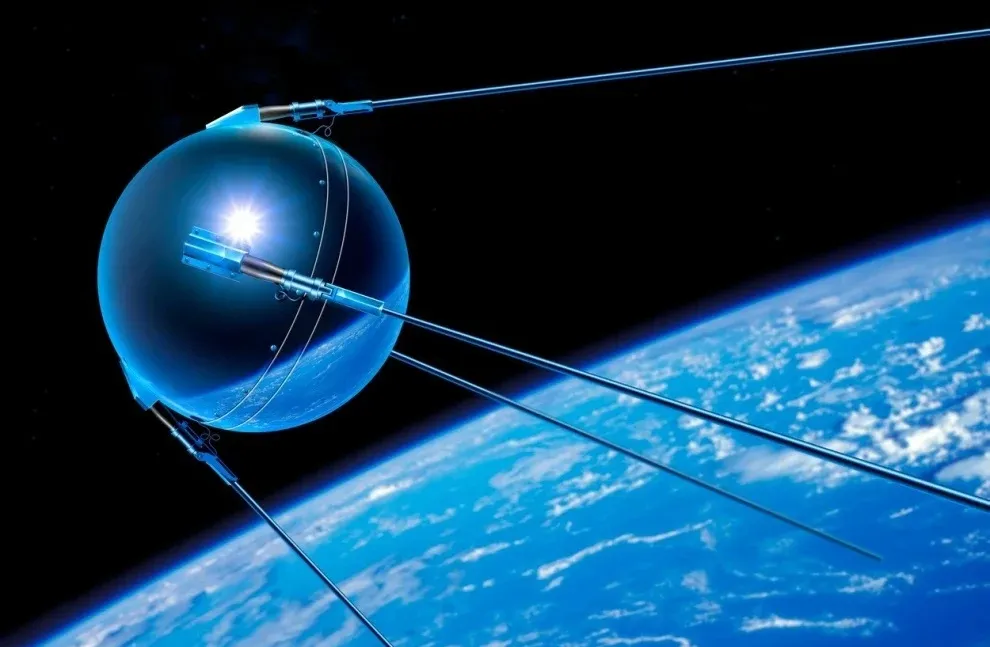
Первый шаг в области космической робототехники был сделан 4 октября 1957 года, когда Советский Союз запустил спутник “Спутник-1” — первый искусственный спутник Земли. Это событие ознаменовало начало космической эры и положило основу для последующего развития роботизированных технологий в космосе.
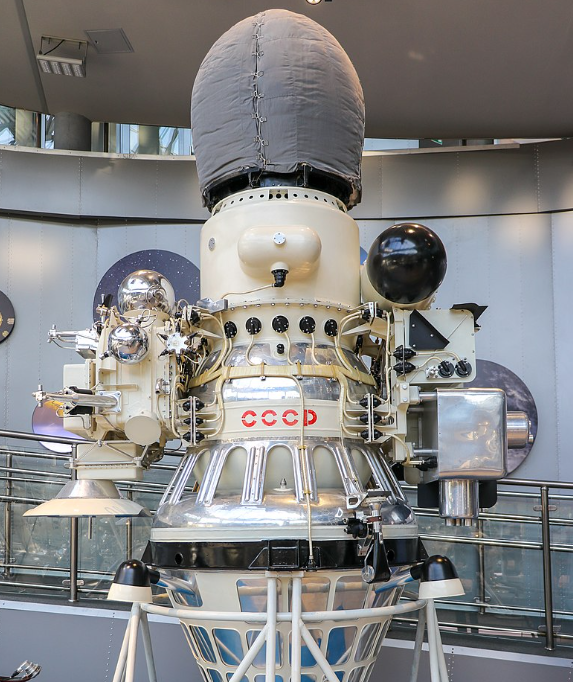
3 февраля 1966 года советская автоматическая станция «Луна-9» впервые в истории совершила мягкую посадку на Луну и передала панорамные снимки лунной поверхности. Это был первый робот, который успешно приземлился на другое небесное тело.
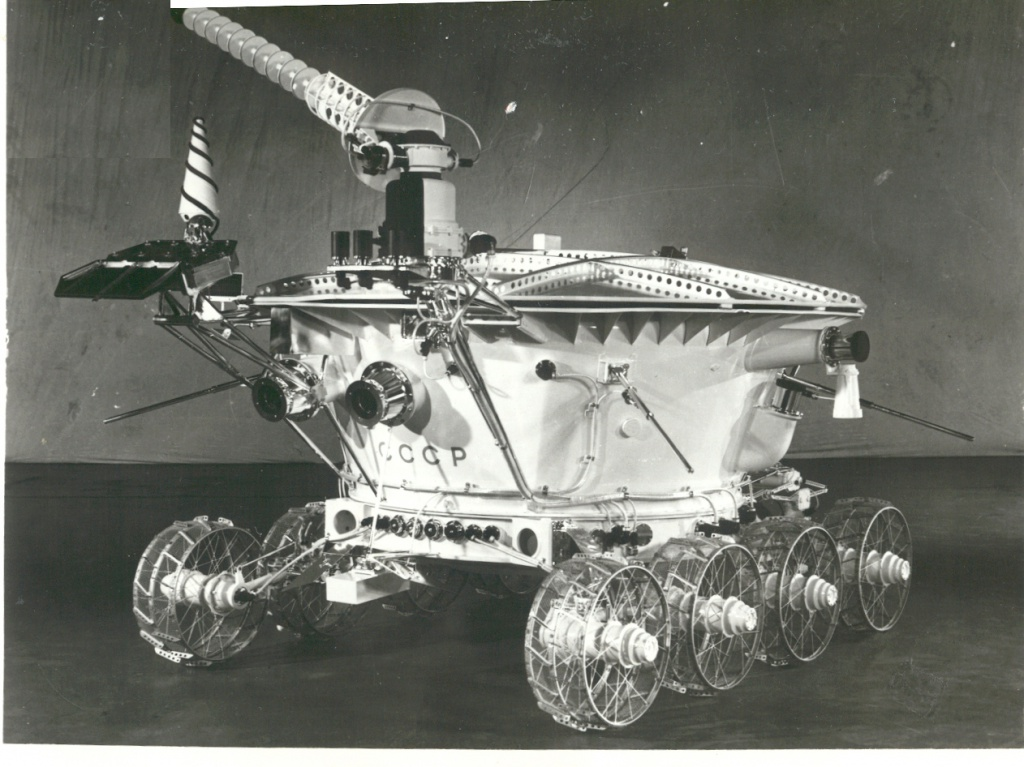
В 1970 году на Луну был доставлен «Луноход-1» — первый в мире дистанционно управляемый планетоход. Он был оснащён камерами, рентгеновским спектрометром, лазерным отражателем и приборами для анализа грунта. «Луноход-1» проработал 10 месяцев и преодолел более 10 километров по поверхности Луны.
20 июля 1976 года американский посадочный модуль Викинг-1 успешно сел на поверхность Марса. Это был первый робот, не только совершивший посадку на Марс, но и передавший научные данные о марсианской атмосфере, грунте и возможных признаках жизни.

Принцип работы
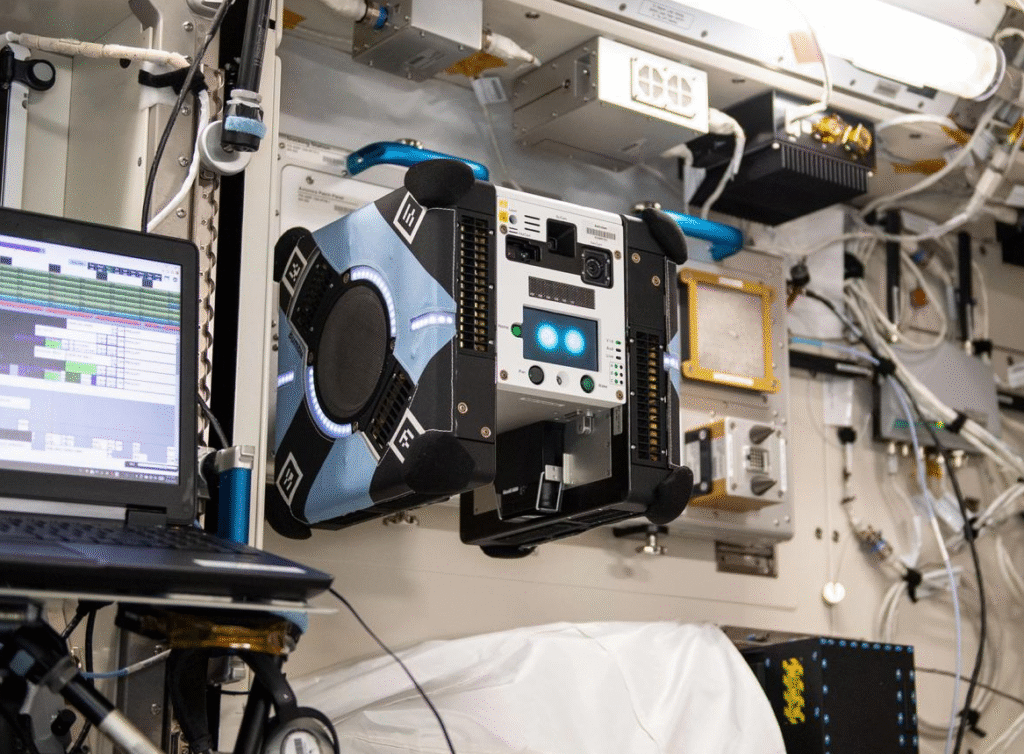
Космические роботы функционируют на основе интеграции сенсоров, алгоритмов управления и исполнительных механизмов. Например, роботы серии Astrobee, используемые на МКС, оснащены камерами и датчиками для навигации в условиях микрогравитации. Они могут работать автономно или под дистанционным управлением, выполняя задачи по инвентаризации, документированию экспериментов и перемещению грузов. Принцип их работы можно описать следующим образом: сенсоры собирают данные о окружающей среде → контроллер обрабатывает информацию и принимает решения → исполнительные механизмы выполняют необходимые действия.
Цель создания роботов
Основная цель разработки космических роботов — выполнение задач, которые либо слишком опасны, либо нецелесообразны для человека. Они используются для сбора научных данных, обслуживания спутников, строительства и обслуживания космических станций, а также для помощи астронавтам в выполнении рутинных или опасных операций.
Применение
- Планетарные исследования — роботы изучают поверхность, геологию и климат других планет и спутников.
- Сбор и доставка образцов — используются для сбора грунта, пыли и минералов с целью последующего анализа на борту или доставки на Землю.
- Строительство и обслуживание объектов — роботы помогают в сборке и ремонте космических станций, спутников и будущих баз на Луне и Марсе.
- Обслуживание спутников — выполняют задачи по диагностике, заправке и модернизации спутников на орбите.
- Помощь экипажу — роботы могут помогать космонавтам с выполнением рутинных, трудоёмких или опасных операций на станции.
- Мониторинг окружающей среды — отслеживают радиационный фон, утечки, состояние воздуха и другие параметры.
- Астрономические наблюдения — используются для наблюдения за звёздами, галактиками и космическими объектами в удалённых точках.
- Автоматизированные миссии — выполняют задачи без участия человека: посадка, навигация, анализ, передача данных.
- Обеспечение связи и логистики — поддерживают связь между различными элементами миссий и доставляют оборудование.
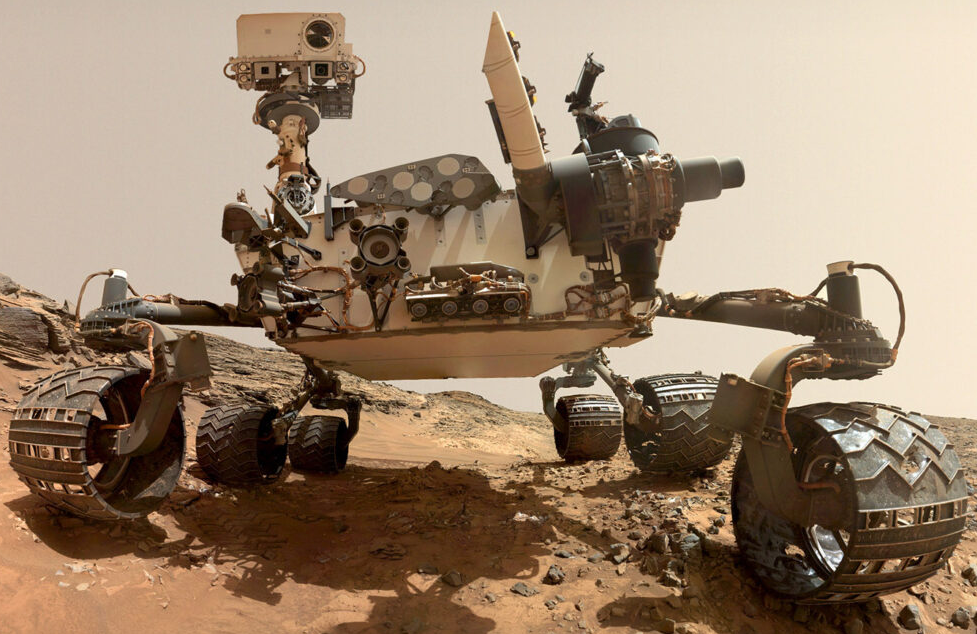
Пример
Посадка ровера Perseverance на Марсе
Astrobee
Плюсы и минусы
Плюсы
- Безопасность — роботы могут работать в экстремальных условиях (радиация, вакуум, высокая температура), где человеку находиться опасно.
- Непрерывность работы — они могут функционировать круглосуточно, не нуждаются в отдыхе, пище или кислороде.
- Снижение затрат — запуск роботов обходится дешевле, чем пилотируемых миссий, особенно на большие расстояния.
- Точность — современные роботы способны выполнять тонкие научные задачи с высокой точностью.
- Удалённый контроль — их можно управлять с Земли или заранее запрограммировать на автономные действия.
Минусы
- Задержка сигнала — управление в реальном времени затруднено из-за задержек в передаче данных на большие расстояния.
- Ограниченная адаптация — роботы не могут импровизировать или принимать нестандартные решения так, как человек.
- Технические сбои — поломка даже одного модуля может привести к потере всей миссии.
- Высокая стоимость разработки – создание надёжных космических роботов требует больших ресурсов и времени.
- Ограниченный срок службы — большинство аппаратов рассчитаны только на определённую продолжительность миссии и не подлежат ремонту.
Развитие
Развитие космических роботов продолжается, и существует множество направлений, в которых их можно усовершенствовать:
Улучшение автономности — разработка более «умных» алгоритмов, позволяющих роботам принимать решения без участия человека, адаптироваться к неожиданным ситуациям и изменяющимся условиям.
Интеграция искусственного интеллекта — использование ИИ позволит роботам эффективнее анализировать данные, распознавать объекты, выбирать маршрут и оптимизировать научные задачи.
Повышение надёжности — разработка модульных конструкций с возможностью самодиагностики, автоматического ремонта или обхода неисправных узлов.
Улучшение источников энергии — использование более эффективных солнечных панелей, радиоизотопных генераторов или будущих технологий хранения энергии, чтобы роботы могли работать дольше.
Миниатюризация и легкость — создание более лёгких и компактных моделей, которые проще и дешевле доставлять на орбиту или поверхность планет.
Взаимодействие между роботами — разработка систем, в которых несколько роботов работают вместе как команда — например, один собирает данные, другой анализирует, третий передаёт информацию.
Заключение
Роботы играют ключевую роль в освоении космоса, выполняя задачи, которые были бы невозможны или опасны для человека. Их использование значительно расширяет возможности научных исследований, технического обслуживания и подготовки к будущим пилотируемым миссиям. Благодаря автоматическим системам человечество получило уникальные данные о Луне, Марсе и других объектах Солнечной системы.
Космические роботы объединяют достижения в области инженерии, программирования, сенсорных технологий и искусственного интеллекта. Они позволяют проводить длительные и точные исследования в экстремальных условиях, снижая затраты и риски.